ONNX MDF Converter
ONNX (Open Neural Network Exchange) is an important format for exchanging models between machine learning environments. It is used in the MDF function ontology, and models in ONNX format can be exported to MDF. Converting MDF->ONNX is best enabled currently by converting the model to PyTorch and from there to ONNX.
ONNX to MDF
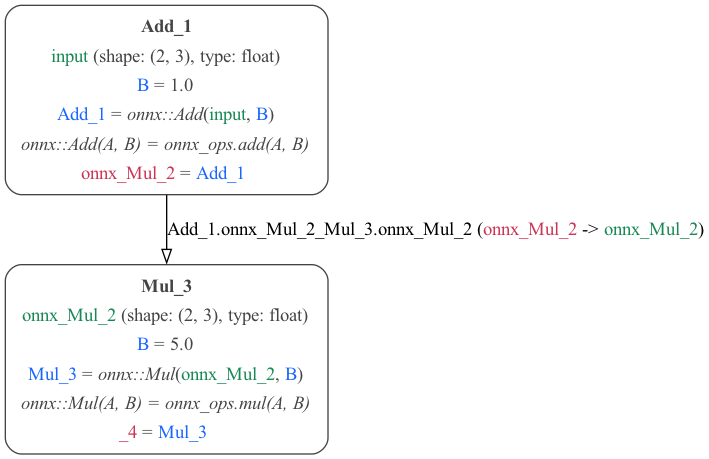
AB Sequential Model - 2 nodes
Python source | JSON | YAML
This is an example of a PyTorch model with 2 nodes. First, the script saves the PyTorch model as ONNX and then converts this to MDF. The graphical view of the generated MDF is shown below.
ABC Sequential Model with Loop
Python source | JSON | YAML
Note: Example still in development!
This is an example of a PyTorch model that is implemented in onnx_mdf/examples/simple_abc.py. The model code
is very simple:
import torch
class A(torch.nn.Module):
def forward(self, x):
return x + 1
@torch.jit.script
def loop_b(x, y):
for i in range(int(y)):
x = x / 10
return x
class B(torch.nn.Module):
def forward(self, x, y):
return loop_b(x, y)
class C(torch.nn.Module):
def forward(self, x):
return x * 100
class ABC(torch.nn.Module):
def __init__(self):
super(ABC, self).__init__()
self.A = A()
self.B = B()
self.C = C()
def forward(self, x, B_loop_count):
return self.C(self.B(self.A(x), B_loop_count))
This implements a PyTorch model with three modules. The modules process the input sequentially, and the
inner B module has a loop construct.

It is exported to ONNX via a combination of tracing and scripting.
ABCD Branching Conditional Model
Python source | JSON | YAML
Note: Example still in development!
This is an example of a PyTorch model that have four components (A, B, C, D). We loop over the whole model 10 iterations. A is executed only on the first iteration, B is executed every iteration, C is executed every 5 times B is executed, and D is executed every 10 times B is executed. A, B, C, and D are each simple stateless linear functions. This type of conditional execution specification is common in PsyNeuLink. The PyTorch code for the model is fairly straightforward:
class Linear(torch.nn.Module):
def __init__(self, slope=1.0, intercept=0.0):
super(Linear, self).__init__()
self.slope = slope
self.intercept = intercept
def forward(self, x):
return self.slope*x + self.intercept
class ABCD(torch.nn.Module):
def __init__(self, A, B, C, D):
super(ABCD, self).__init__()
self.A = A
self.B = B
self.C = C
self.D = D
def forward(self, x):
# Since we are implementing conditions that reference the number of calls
# to A and B, we need to keep track of this.
num_A_calls = 0
num_B_calls = 0
# We need to initialize outputs, torchscript jit complains if c and d
# are not defined in the FALSE branches of our conditionals.
a = torch.zeros_like(x)
b = torch.zeros_like(x)
c = torch.zeros_like(x)
d = torch.zeros_like(x)
for i in range(10):
# A: pnl.AtNCalls(A, 0),
if num_A_calls == 0:
a = self.A(x)
num_A_calls = num_A_calls + 1
# B: pnl.Always()
b = self.B(a)
num_B_calls = num_B_calls + 1
# C: pnl.EveryNCalls(B, 5),
if num_B_calls % 5 == 0:
c = self.C(b)
# D: pnl.EveryNCalls(B, 10)
if num_B_calls % 10 == 0:
d = self.D(b)
return c, d
The ONNX IR representation of this model is shown below. The small computation sub-graphs contained in the if and else body attributes are not shown. These are either a simple multiplication and addition or an identity.